Les logiciels compatibles CysBOX
Les fonctionnalités du système CysBOX sont assurées par différents modules logiciels.La principale fonctionnalié est la fonction Autopilot, assurée par le logiciel CyPilot.
Logiciels spécifiquement adaptés au système CysBOX :
CyPilot :
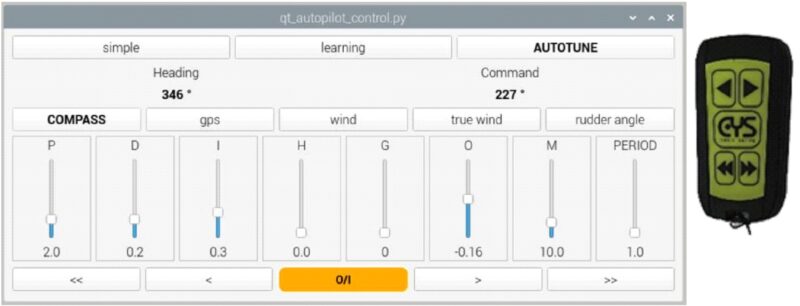
Ce logiciel, associé au module de contrôle de barre CysPWR offre les fonctionnalités Autopilot et a été intensivement testé en navigation réelle. Il est plus spécialement conçu pour les voiliers, avec un objectif de performance, de fiabilité et d’adaptabilité au bateau et à son environnement:
- Multiples modes de fonctionnement : cap compas, cas GPS, vent réel, vent apparent, angle de barre, …
- Différents algorithmes de traitement : « simple » avec PID basique, « auto-tuning » avec une sélection automatique des paramètres PID en fonction des conditions, « auto-learning » avec un module d’auto-apprentissage
- Acquisition des données à haut débit : GPS jusqu’à 18Hz, Vent jusqu’à 10Hz, IMU, …
- Télécommande 433MHz IP68
CyAlarm :
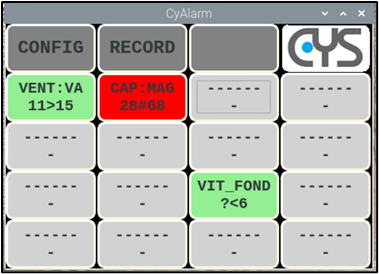
Le système de report d’alarmes en synthèse vocale CyAlarm assiste le skipper pour surveiller les principaux paramètres disponibles sur le bateau, issus des différents capteurs : vent, profondeur, loch, …
Les messages d’alarmes sont émis sur la sortie Audio du système CysBOX pour être mixés avec la sortie audio de la VHF de bord, et être émis vers le haut-parleur de cockpit.
Autres logiciels compatibles :
qtVlm : C’est notre solution préférée pour la navigation, le routage,… Le logiciel peut être facilement configuré pour s’interfacer via TCP avec CyPilot agissant comme une passerelle et un concentrateur NMEA.

La combinaison CyPilot + qtVlm est utilisée sur le voilier principalement utilisé pour les tests, un voilier A40. Le logiciel peut être directement installé sur le module Raspberry Pi4 interne. https://www.meltemus.com/index.php/fr/
SignalK server : L’installation du serveur SignalK permet de faciliter la gestion des différentes informations issues des capteurs et du logiciel autopilote. https://signalk.org/
Notez que le serveur SignalK peut être installé en option lors de la procédure d’installation de CyPilot.
OpenCPN : Le système CysBOX permet aussi l’utilisation de logiciels cartographie et de navigation tel que OpenCPN qui peuvent être soit directement installés sur le processeur Raspberry Pi4 interne, soit sur un PC.
https://opencpn.org/
Notes :
- CyPilot : Les premiers tests en mode autopilote de la plateforme matérielle CysBOX avaient été réalisés avec le logiciel « pypilot ». Le logiciel CyPilot a ensuite rapidement été développé dans un souci d’optimisation pour cette plateforme. Ce logiciel utilise désormais des solutions techniques différentes (IMU, contrôle d’angle de barre, algorithmes de traitement, capteurs, …)
- CyAlarm : Ce logiciel est issu d’un développement réalisé lors de la préparation du voilier Nacira 6.50 Cœur Fidèle-721 pour la MiniTransat 2015.
- Le logiciel CyPilot contient du logiciel développé par des personnes tierces, incluant du code soumis à la licence GNU General Public License (« GPL »), Version 1 / Version 2 / Version 3 ou GNU Lesser General Public License (« LGPL »).
Vous pouvez utiliser le logiciel à condition de suivre les termes de la licence GPL.
Afin de respecter les termes de la GPL, le code source lisible sur une machine du logiciel soumis à la GPL peut être obtenu sur simple demande.