
CysPWR
CysPWR is the power unit for helm control.
The CysPWR interface is controlled by the CysBOX central unit via a dedicated COM link. This interface allows the use of electric and hydraulic actuators:
- 12V or 24V servomotor (max 40A)
- clutch control (max 4A)
- rudder angle sensor
The CysBOX central unit sends a rudder angle setpoint, and receives information from the sensors associated with the CysPWR interface (measured rudder angle, temperature, battery voltage, etc.)
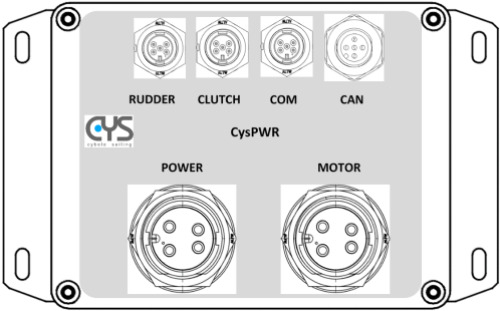
CysPWR : power unit for helm control
- Processor :
- ATMEGA64M1
- Connectivity :
- Power : 1 x DC04 Power input (max 40A)
- Motor : 1 x DC04 Helm motor output (eg: L&S clutch, max 40A)
- Rudder : 1 x AU05 Rudder angle sensor and temperature probe inputs (option)
- Clutch : 1 x AU05 Cylinder clutch output and Bar stop inputs (option)
- Serial : 1 x AU05 Serial link HS CysBOX
- CAN : 1 x NMEA2000 (option)