Main module (processor / router / server)
CysBOX
CysBOX is the central unit of the CysBOX System assembly, the “heart” of the system, which offers advanced functionalities based on adapted software applications: autopilot, alarm management, etc., and the most suitable management and navigation software. more widespread (signal-K server, mapping, etc.).
A hardened IP65 touch screen, USB or Wireless keyboard provide a complete management unit for boat control and navigation.
CysBOX : main features
- Processor:
- Quad-core ARM at 1.5GHz (Raspberry Pi4B)
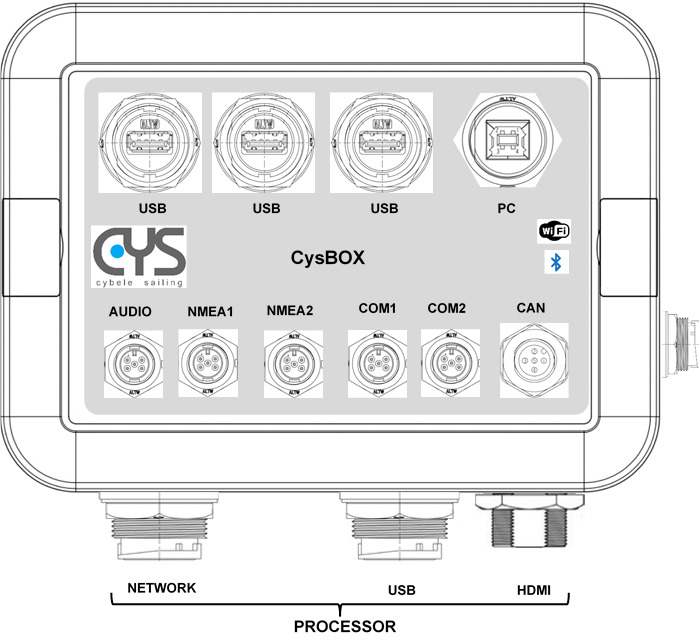
- Connectivity :
- USB : 3 x USB “Host”
- PC : 1 x USB “Device”
- NMEA1, NMEA2 : 2 x NMEA0183
- COM1, COM2 : 2 x HS serial links (1 Driver, 1 GP)
- CAN : 1 x NMEA2000
- AUDIO : 1 x Analog/Audio
- HDMI : 1 x Video (optional external screen)
- GPS : 1 x SMA (active GPS antenna)
- RF : 1 x SMA (RF remote control antenna)
- LAN : 1 RJ45 Gigabit/Ethernet
- Internal functions :
- Slot Pi4B :
- I/O 40 and USB3
- Power management
- Gigabit/Ethernet and Wifi
- Bluetooth
- HUB USB (1 reversible port for PC connection)
- GPS : update rate up to 18Hz (U-Blox)
- 9-axis IMU: 10Hz measurement frequency (BNO085-Hillcrestlabs)
- RF433Mhz : CysRC pilot remote control (RFM69)
- UART HS :
- NMEA2000 (CAN gateway ATMEGA64M1)
- NMEA0183 (2)
- HS serial port (2 including CysPWR pilot link)
- 433MHz radio interface (dedicated to the CysRC pilot remote control)
- Analog / Audio interface
- Slot Pi4B :
- Applications :
- Pilot (cypilot)
- Voice alarms (cyalarm)
- Open source applications compatible with Raspberry OS
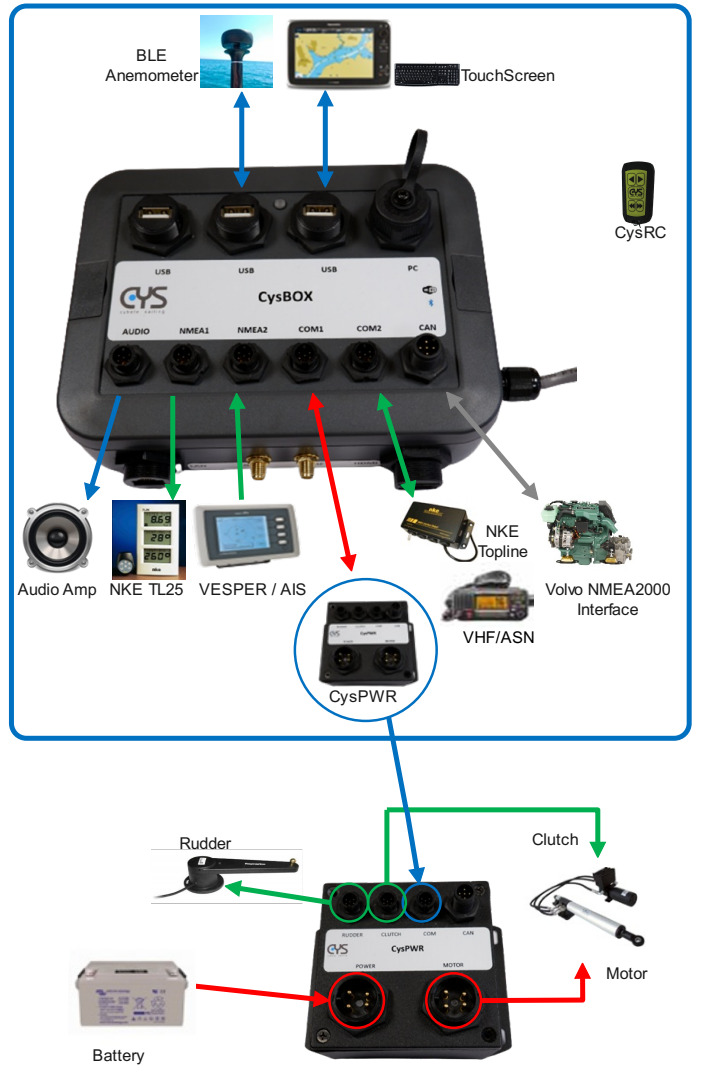
Installation example:
Many development and validation tests were carried out while sailing in the Mediterranean Sea with an A40 sailboat in the following configuration: